Урок 2
§1. Введение в робототехнику
Содержание урока
Из чего состоит робот?
Из чего состоит робот?
 Прежде всего робот — это механическое устройство. Поэтому его постройка — это инженерная, конструкторская работа. Нужно, чтобы все детали были хорошо закреплены, и робот не потерял равновесия и не развалился во время выполнения задания. В то же время все подвижные детали должны исправно двигаться и крутиться.
Прежде всего робот — это механическое устройство. Поэтому его постройка — это инженерная, конструкторская работа. Нужно, чтобы все детали были хорошо закреплены, и робот не потерял равновесия и не развалился во время выполнения задания. В то же время все подвижные детали должны исправно двигаться и крутиться.
Роботом нужно как-то управлять, поэтому необходима система управления, которая в современных роботах строится на микроконтроллерах.
 Микроконтроллер — это миниатюрный компьютер, все части которого размещены на одном кристалле кремния. Он содержит процессор, разъёмы для управления внешними устройствами (порты), оперативную и постоянную память. В постоянную память микроконтроллера записана программа, которую он при включении сразу начинает выполнять.
Микроконтроллер — это миниатюрный компьютер, все части которого размещены на одном кристалле кремния. Он содержит процессор, разъёмы для управления внешними устройствами (порты), оперативную и постоянную память. В постоянную память микроконтроллера записана программа, которую он при включении сразу начинает выполнять.
Используя дополнительные источники, выясните, кто и когда впервые получил патент на микроконтроллер.
Для того чтобы робот мог двигаться, нужны исполнительные устройства — моторы, которые преобразуют электрическую энергию в механическую энергию вращения. Автономные роботы чаще всего передвигаются с помощью колёс или гусениц, для неровных поверхностей иногда используют шагающие системы. Существуют также ползающие и плавающие роботы.
Передвижение роботов — это достаточно сложная самостоятельная задача. Например, современные роботы-спасатели должны уметь подниматься по лестнице здания.
Для того чтобы получать данные об окружающей обстановке, роботу нужны датчики (сенсоры, чувствительные элементы) — устройства, которые измеряют какую-то физическую величину и выдают информацию о ней в виде электрических сигналов. Поскольку эти сигналы затем будет обрабатывать цифровой компьютер, их нужно преобразовать в двоичный код, в числа. Эту работу выполняет аналого-цифровой преобразователь (АЦП), который, как правило, встроен в микроконтроллер.
Существуют различные типы датчиков (рис. 1.2): датчики температуры, давления, скорости, освещённости, датчики касания («кнопки»), датчики расстояния (они измеряют время, за которое ультразвук отражается от препятствия и возвращается обратно), инфракрасные датчики для поиска и обнаружения объектов и многие другие. Более сложные роботы имеют системы компьютерного зрения на основе видеокамер. Они могут «узнавать» простые предметы, определять их расположение в пространстве и достраивать невидимые части, используя информацию из своей базы данных.

Рис. 1.2
Таким образом, встроенный микроконтроллер робота управляет исполнительными устройствами и обрабатывает данные, поступающие с датчиков (рис. 1.3).
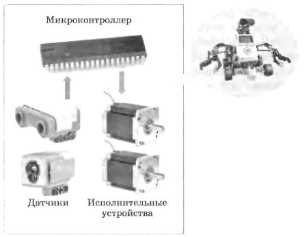
Рис. 1.3
Используя дополнительные источники, выясните, какие микроконтроллеры применяются:
• в наборах LEGO Mindstorms;
• на платах Arduino, которые широко используются робототехниками-любителями.
На какой тактовой частоте они работают? Сравните её с тактовой частотой процессоров для настольных компьютеров.
Следующая страница  Выводы
Выводы
Cкачать материалы урока
