Урок 6
Информация и управление. Системный подход. Информационное общество
(§4. Информация и управление. §5. Информационное общество)
Содержание урока
§4. Информация и управление
Системы управления
§5. Информационное общество
§4. Информация и управление
Системы управления
Во многих системах взаимодействие между подсистемами можно рассматривать как управление. Такие системы (их называют системами управления) всегда содержат управляющий объект (в теории управления его называют регулятором) и управляемый объект (просто «объект»). Цель управления чаще всего задаётся извне, т. е. регулятор является только исполнителем. Например, водитель служебной машины никогда не решает сам, куда везти своего начальника.
Регулятор действует на объект (управляет им) так, чтобы цель была достигнута (рис. 1.12).
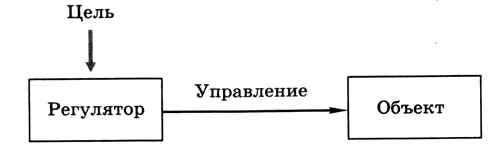
Рис. 1.12
 Управление (управляющее воздействие) — это сигнал, который поступает от регулятора к объекту. Это значит, что при управлении передается информация.
Управление (управляющее воздействие) — это сигнал, который поступает от регулятора к объекту. Это значит, что при управлении передается информация.
На приведённой схеме (см. рис. 1.12) регулятор не получает никакой информации о состоянии объекта, т. е. действует «вслепую». Такие простейшие системы управления называют разомкнутыми, в них информация идет только в одну сторону, от регулятора к объекту. Приведём некоторые примеры разомкнутых систем:
• светофор (выдаёт вам световой сигнал, но не получает информации от вас);
• табло на вокзале или в аэропорту;
• процессор выставляет данные для записи в ОЗУ на шину, ждёт некоторое время и затем, без всякого подтверждения от ОЗУ, продолжает работу (считается, что ОЗУ работает надёжно и за это время данные всегда записываются);
• начальник отдаёт приказания, но не проверяет их выполнение.
Разомкнутые системы используются в двух случаях. Во-первых, когда регулятору всё равно, реагирует ли объект на управление (светофор, табло). Во-вторых, когда регулятор настолько хорошо знает объект (имеет точную модель объекта), что уверен в выполнении своих команд. Например, начальник, уверенный в исполнительности своих подчинённых, может позволить себе (иногда) не контролировать их.
Достоинство разомкнутых систем — в их простоте. Например, во многих случаях частоту вращения электродвигателя регулируют простым реостатом, при этом не нужно ставить сложный и дорогостоящий датчик частоты вращения.
В ответственных случаях разомкнутые системы лучше не применять, потому что они имеют серьезные недостатки:
• для достижения цели регулятор должен иметь точную модель объекта; на практике такая модель чаще всего неизвестна;
• на объект всегда действует внешняя среда, и из-за этого воздействия свойства объекта могут непредсказуемо меняться; регулятор в разомкнутой системе не получает об этом никакой информации.
Даже очень исполнительные работники могут в какой-то момент «схалтурить» из-за личных переживаний или неурядиц. Поэтому в разомкнутых системах чаще всего нельзя гарантированно достичь цели управления, т. е. решить поставленную задачу.
Для достижения цели регулятор должен получать информацию от объекта. Этот канал передачи информации называют обратной связью, потому что по нему информация передаётся (с помощью датчиков) в обратном направлении, от объекта к регулятору (рис. 1.13). Системы с обратной связью называют замкнутыми системами управления, потому что информация передаётся по замкнутому контуру, циклически.
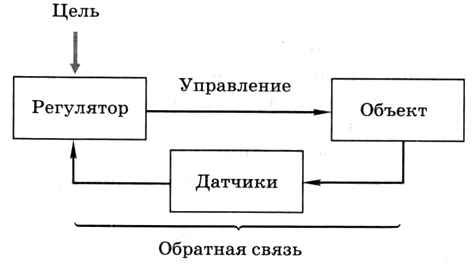
Рис. 1.13
Задача регулятора — сравнить поставленную цель и реальное состояние объекта, а потом выдать нужный управляющий сигнал. Если цель достигнута, как правило, сигнал управления больше не изменяется.
Например, регулировщик, управляющий движением на перекрёстке, использует обратную связь. Он оценивает (с помощью глаз-датчиков) количество машин, движущихся в разных направлениях, и «открывает» то или другое направление. Человек управляет лучше, чем светофор, потому что учитывает реальную обстановку, которая может изменяться непредсказуемо.
Чаще всего реальные системы управления (в природе, технике, обществе) — это замкнутые системы. Они обладают несомненными достоинствами:
• могут решать задачу даже тогда, когда модель объекта неточна или свойства объекта изменяются во времени;
• позволяют учитывать случайные воздействия внешней среды.
За это приходится расплачиваться усложнением системы — нужны датчики, которые передают информацию от объекта.
Представьте себе, что в тёмной комнате упала на пол пуговица, и вы не слышали, как она стукнулась. Сказать точно, где лежит пуговица, не сходя с места, невозможно, потому что вы этого не знаете (модель неточна). Вы можете попробовать искать её на ощупь (используя обратную связь — осязание). Если и это не получается, можно включить свет (зрительная обратная связь даёт больше информации), и тогда пуговица точно будет найдена (если она, конечно, там есть). В этом примере датчиками служат наши органы чувств.
Системы с обратной связью широко используются в технике. Это, например, автопилоты на самолётах и судах, регуляторы частоты вращения турбин, роботы, оборудованные датчиками (в том числе устройствами «компьютерного зрения»).
Обратная связь существует и в обществе. Жалобы граждан должны помогать работе органов управления, сигнализируя о том, что не всё в порядке. Не зря все официальные учреждения имеют контактные телефоны и сайты в Интернете, с которых можно отправить сообщение с просьбой или предложениями по их работе.
Обратная связь, при которой регулятор стремится уменьшить разницу между заданной целью и фактическим состоянием объекта, называется отрицательной.
Если нужно быстро перевести объект из одного состояния в другое, иногда применяют положительную обратную связь, при которой регулятор стремится увеличить разницу между заданным значением и сигналом обратной связи. Часто в этом случае система переходит в колебательный режим, поэтому положительная обратная связь используется в генераторах колебаний. Другой пример положительной обратной связи — цепные реакции в химии и физике (горение, взрыв, ядерные реакции).
Системы управления делятся на автоматические и автоматизированные. Автоматические системы работают без участия человека, например автопилот. В автоматизированных системах сбор и предварительную обработку информации выполняет компьютер, а решение по поводу управления принимает человек.
Многие системы умеют «подстраиваться» под изменения внешних условий или изменение свойств объекта управления. Они называются адаптивными. Классическая адаптивная система — глаз человека, который изменяет диаметр зрачка в зависимости от освещённости. В технических системах адаптивные регуляторы могут управлять объектом, модель которого очень плохо известна или меняется. Они параллельно решают две задачи — управляют и уточняют имеющуюся модель, что, в свою очередь, позволяет улучшить управление.
Следующая страница  Вопросы и задания
Вопросы и задания
Cкачать материалы урока
