Урок 3
§2. Управление роботами
Содержание урока
Управление без обратной связи
Практическая работа № 2 «Управление без обратной связи»
Управление без обратной связи
В задачах с движущимися роботами мы будем управлять моторами, которые приводят в движение колёса или гусеницы. Расширим алгоритмический язык командой
мотор[n]:=d
Здесь n — это порт вывода, a d — мощность мотора в процентах, которая нам требуется (от 0 до 100%). Для вращения мотора в обратную сторону нужно задать отрицательную мощность — от -100 до 0%.
Будем обозначать порты для подключения моторов порядковыми номерами, начиная с нуля: 0, 1, 2 и т.д. Вот так можно включить мотор 0 на полную мощность на 2 секунды, а затем выключить:
мотор[0]:=100
ждать(2000)
мотор[0]:=0
Далее мы будем работать с роботом, у которого два мотора, связанные с двумя ведущими колёсами. Мотор 0 вращает левое колесо, а мотор 1 — правое.
Запишите в тетради программу, выполняя которую робот сначала проедет вперёд, потом — назад, потом — снова вперёд, и так будет продолжать бесконечно долго.
Что произойдёт, если включить один из моторов в одну сторону, а второй — в другую?
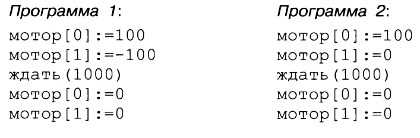
Сравните две программы и определите, чем отличаются действия Робота при их выполнении.
Следующая страница  Выводы
Выводы
Cкачать материалы урока
